Imagine you are a robotics startup and working on an innovative robot. You build it from off-the-shelf blocks just to verify the concept. Then you see that it’s successful and you want this device to hit the market. What you should do next is optimize the product’s functionality to make it stable. Off-the-shelf blocks are not efficient in the long term: for smooth device operation, you need solutions designed specifically for your product.
And that’s the exact story we want to tell you here. A robotics startup created a robot prototype. They came to Softeq to improve its functionality and prepare it for market entry. While we were working on the main task, we also found a way to reduce the cost of robot components. Let’s see how.
|
|
How Optimized Power Supply Improves Robot Stability
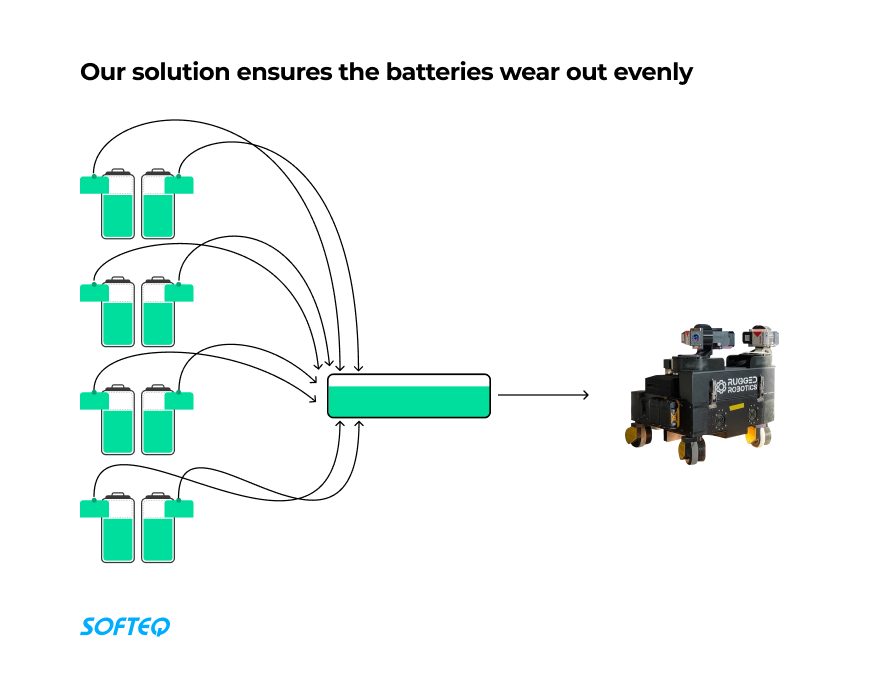
Our main task was to implement a printed circuit board (PCB) to manage the robot’s power supply. The challenge was that the robot prototype was powered by four pairs of batteries. This meant the solution had to discharge all four battery pairs simultaneously. Otherwise, the pair used most often would wear out more than the others. In this case, the customer would have to charge it more often, and it would eventually start to lose its capacity. Moreover, if the battery runs out to a critical level, it would become impossible to charge it using conventional methods.
To avoid this, we developed a solution that draws energy from all eight batteries and then distributes it to the robot’s systems. This ensures even and simultaneous battery wear and tear.
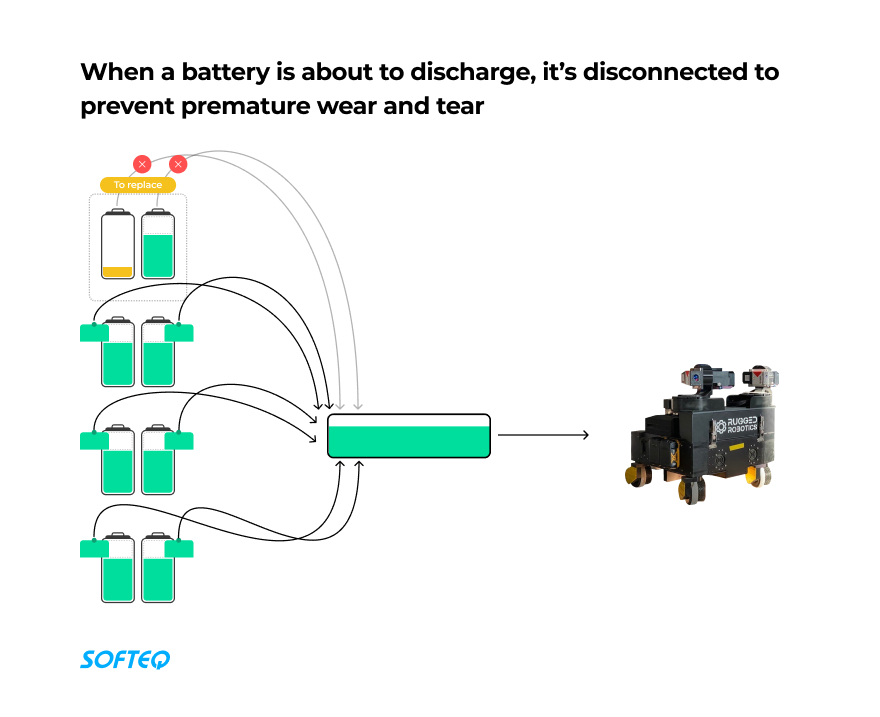
However, this solution doesn’t cover one scenario: when the batteries initially have different capacities. This is the case with older batteries—as a rule, they hold less energy and discharge faster. To protect the power system from such imbalances, we implemented a special mechanism. It monitors each battery’s status by measuring its voltage. When it drops to a critical level, this means the battery is about to run out. Our solution disconnects this battery pair while the remaining batteries continue to power the robot.
How Simulations Enable Testing Without Expensive Physical Samples
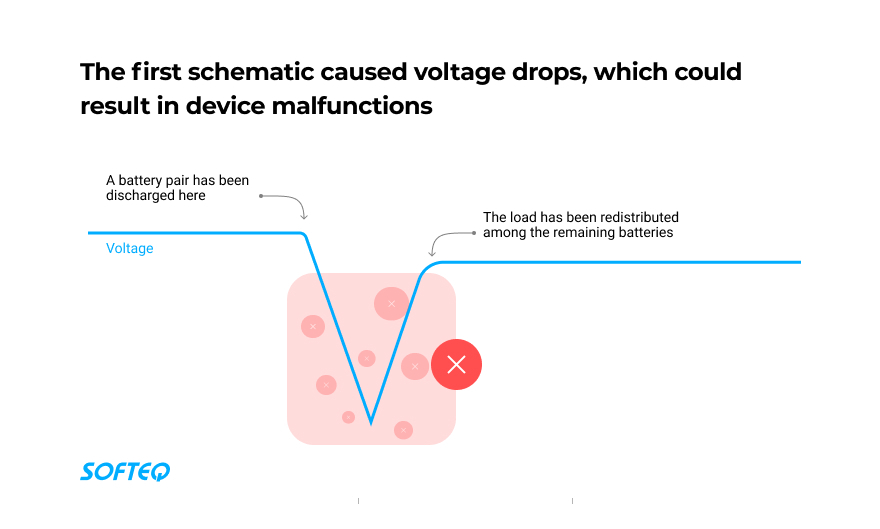
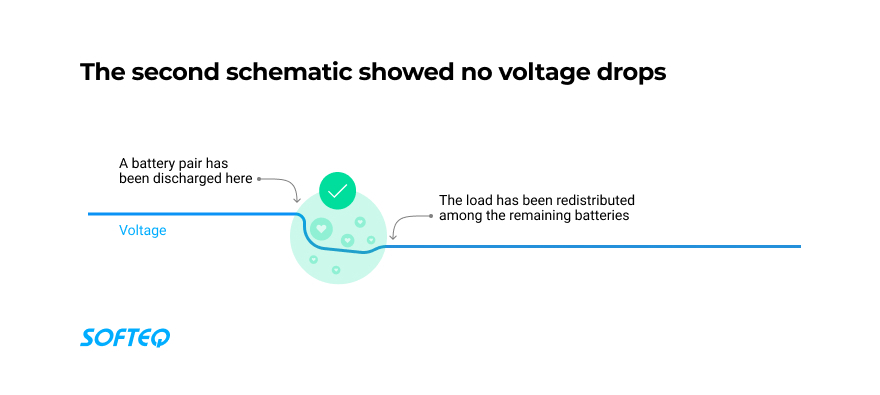
After we designed the power system, we had to choose the right components for the board. We decided to simulate how they would behave in real life before buying them. Using special software, we simulated the moment when a battery pair would be discharged. At this point, the system would disconnect it from the common bus and redistribute the load among the remaining batteries.
We had two sets of components to choose from. The team ran simulations that showed the first set wasn’t well-suited. There was a sudden voltage drop that would cause the robot to fail.
We then tested the other set of components, which ended up being a perfect fit. The test showed that there were no voltage spikes when switching the power supply, so we opted for the second set.
This approach enabled us to save budget in two ways. First, we found a problem that could only be detected after bringing up the PCB, so we were able to avoid a rework. Secondly, this didn’t even require us to produce expensive test samples.
“Producing small trial batches is very expensive. That’s why we use simulations. This helped us identify possible risks that were difficult to predict at the design stage.”
Alex, Senior Schematic Engineer
How a Customized PCB Makes the Robot Safer
The robot must be turned off for safety reasons in an emergency. For example, this is important when there is a risk of collision with machinery or when foreign objects get inside. We implemented three mechanisms to turn the robot off:
- An emergency button on the robot: it’s pressed by a human manually in a dangerous situation
- A wireless emergency button: it’s pressed by a human remotely in a dangerous situation
- Built-in mechanisms in the robot’s software: it detects internal system errors and triggers sending a signal to the PC
As soon as the emergency button is pressed or the robot’s software registers an error, our PCB receives a signal. Then, the PCB sends a command to the switching device to disconnect the robot from the power system. As a result, the robot is safe even in emergency situations.

How Better Component Selection Makes a Particular Function More Sustainable
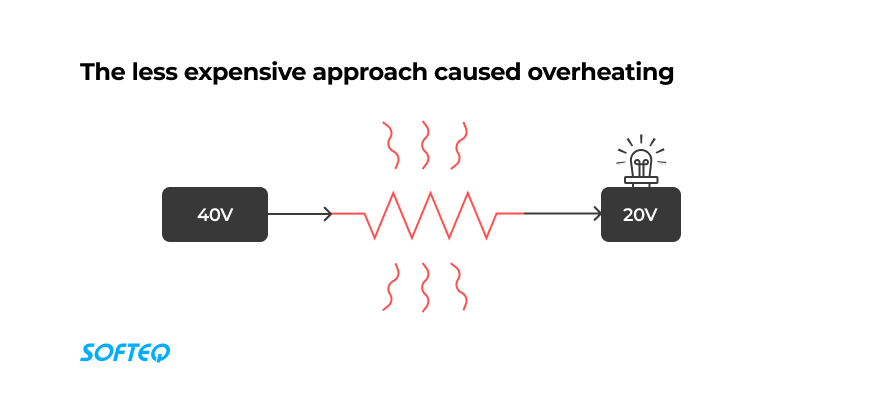
To implement a battery charge indicator, we considered two options: a standard, low-budget option, and another that was more expensive. The standard solution required 20V for illumination. With an input voltage of 40V, there had to be a 20V voltage drop on the current limiting resistor. That also caused overheating, so we gave up on this option.
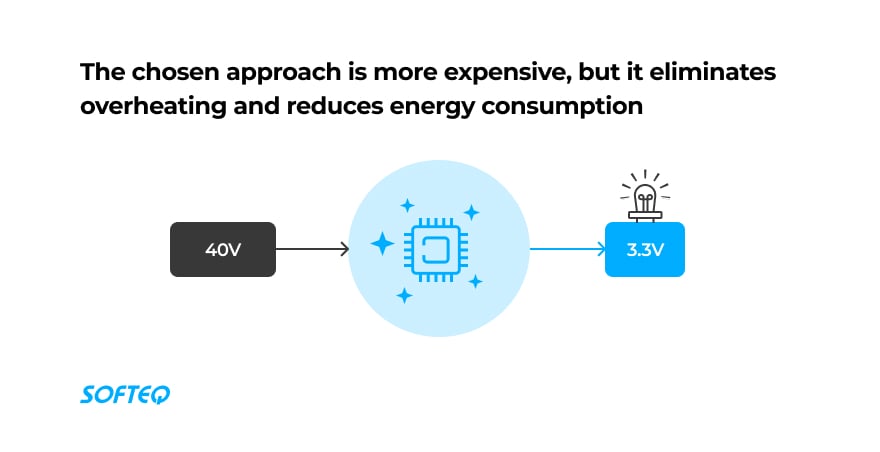
We switched to a more expensive solution. First of all, we replaced a resistor with a converter to reduce the input voltage without causing overheating. The team also replaced the LED components with new ones, which require 3.3V instead of 20V. This reduced the amount of energy needed to power the LED. This solution, although costly at first, is more sustainable and cost-effective in the long run.
How Customized Design Can Reduce Product Costs
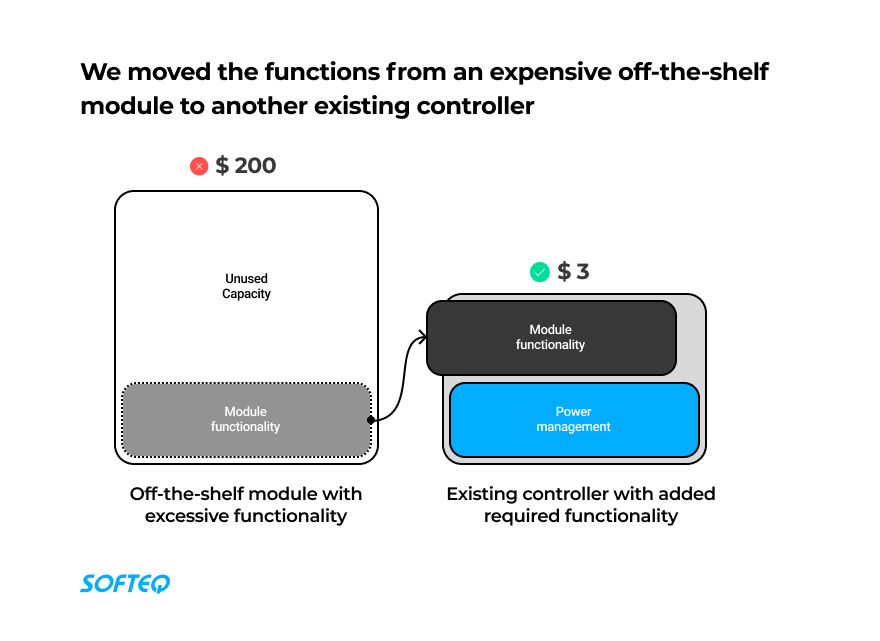
The client prototype was based on off-the-shelf modules. We noticed that the capacity of one of the modules was underutilized. The functionality powered by this module required little computer capacity, so our team had the idea to transfer this functionality to the controller on our PCB. The controller has been powerful enough to support both the power management system and the ported functionality.
As a result, the customer was able to get rid of the expensive module. The cost of the controller is 1.5% of the cost of the original module.
“Using off-the-shelf modules is certainly convenient. Their installation requires minimum effort, and the necessary software and support are already included. However, these solutions are often redundant: a customer uses only a small part of the functionality, overpaying for the rest.”
Alex, Senior Schematic Engineer
How Cheap, Basic Protection Helps Avoid Issues
Construction work can involve dust and moisture. Regardless of all the refinements made, within the first minutes of its “real life” experience, the robot can simply stop working. If the robot is not airtight, dust and moisture can get inside causing contact oxidation or short-circuiting. The device may malfunction as a result.
To make our PCB board airtight, we covered it with a protective layer. Now, if dust and moisture get inside, they won’t damage the PCB tracks and components.
Summing up
This is how we helped Rugged Robotics get their construction robot closer to its first real users. We were happy to participate in the project and help the client make the product more stable and less expensive. We wish them success and hope our solution will help to further scale the product.
If you’re planning to launch your solution to the market, Softeq is up for the challenge. We provide hardware and software development services for startups to help them scale. Let us know how we can help.
![[Webinar] AI Security: Risks, Reality, and What's Next](https://www.softeq.com/hubfs/AI%20Security%20Webinar%20Blog%20FI.png)

![[Webinar] Vibe Coding: Advantages, Pitfalls, and Why You Still Need Developers](https://www.softeq.com/hubfs/VC%20Webinar%20Blog%20FI%202.png)
![[Webinar] From Prototype to Production Accelerating Industrial Automation with Arduino PRO and Softeq](https://www.softeq.com/hubfs/Prototype%20to%20Production-1.png)
![[Webinar] AI & Computer Vision: Cracking the Code & Turning Challenges into Breakthroughs](https://www.softeq.com/hubfs/Softeq%20Computer%20Vision%20Webinar%20Recording%20Featured%20Image%20for%20Blog-1.png)