ADAS-Lösung für Elektrofahrzeuge
Verarbeitet Daten von 15 Full-HD-Fahrzeugkameras in Echtzeit
Der Kunde ist auf die Herstellung von leichten Nutzfahrzeugen spezialisiert und wollte sein Portfolio um ein Fahrerassistenzsystem (ADAS) erweitern.
Lösung

Marktforschung
Softeq hat die auf dem Markt erhältlichen CPU-Module analysiert.
Wir haben nach einem SoM (System-on-a-Module)-Gerät gesucht, das als Grundlage für unser System dienen sollte. Das Gerät musste die folgenden Anforderungen erfüllen:
- in der Lage sein, Daten von 15 Full-HD-Kameras in Echtzeit zu verarbeiten
- zudem auch Daten von anderen internen Fahrzeugsystemen (HMI, IVI, ECU und mehr) über CAN, LIN usw. zu erfassen
Wir haben mehr als 10 CPUs von verschiedenen Anbietern evaluiert. Die Ergebnisse zeigten, dass es keine SoM-Lösung auf dem Markt gab, die Daten von mehr als vier Full-HD-Kameras in Echtzeit einschliesslich Nachbearbeitung verarbeiten kann. Deshalb entschieden wir uns, eine Lösung von Grund auf neu zu entwickeln.
Design der Lösung
Softeq konzipierte eine individuelle Lösung auf Basis der Linux SMP (Symmetric Multiprocessing) Architektur, die mehrere Prozessoren in einem einzigen System kombiniert.
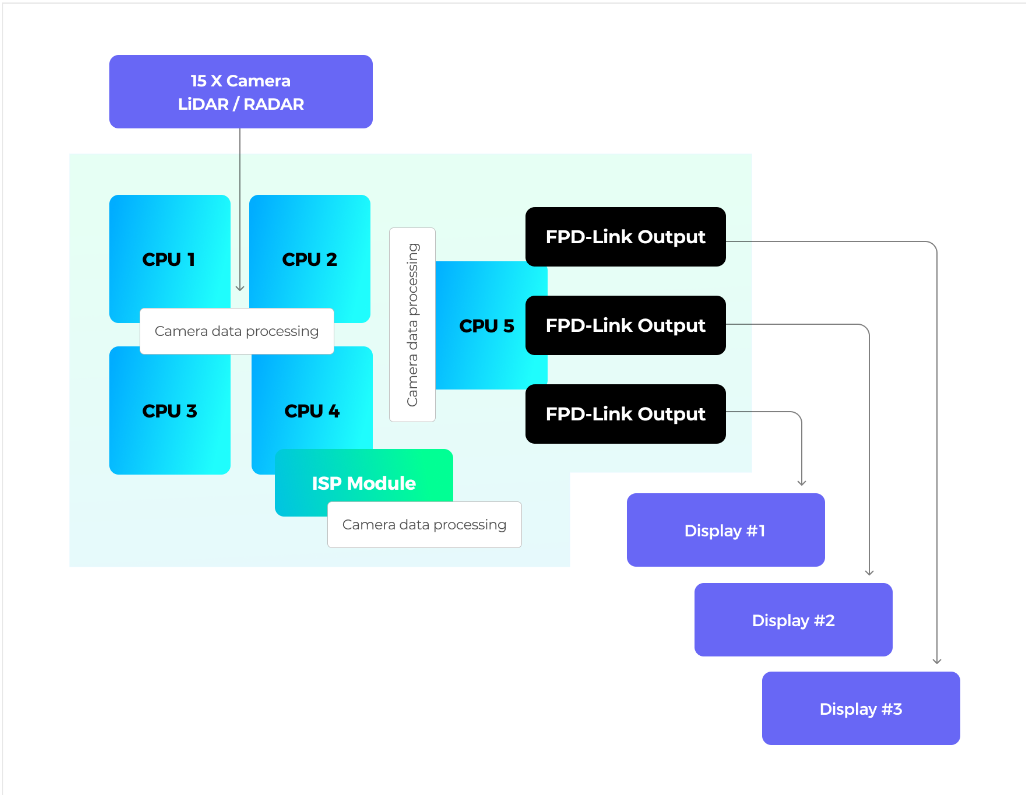
Die Lösung besteht aus fünf ARM-basierten Prozessoren: vier für die Verarbeitung von Kamerabildern und einer für die mathematischen Berechnungen sowie die Verarbeitung externer Verbindungen. Um die Hauptprozessoren zu entlasten, verfügt das Gerät über Koprozessoren, die für die Bildanalyse zuständig sind.
Das System kann die RADAR/LiDAR-Technologie verwenden, um den Abstand zwischen den Objekten genau abzuschätzen. Das Design umfasst 15 Kameraeingänge, 3 FPD-Link-Ausgänge zum Anzeigen von Daten und unterstützt Automotive Ethernet, CAN und LIN.
Datenübertragung
Softeq entwickelte spezielle Treiber für FPD-Link III-Schnittstellen.
Da die Automotive-Industrie spezielle technische Lösungen für den Datentransfer (Data Buses) benötigt, haben wir FPD-Link III-Schnittstellen für Ein- und Ausgabegeräte (Kameras und Displays) verwendet. Unser Team entwickelte spezielle Treiber, die die Interaktion mit Lichtsensoren ermöglichen. Auf dieser Ebene werden Algorithmen zur Objektivkorrektur angewendet, um Bilder zu verbessern: Belichtung, Autofokus, Weißabgleich, Zuschneiden, Skalierung, Entfernung des Fischaugen-Effekts und Farbraumkonvertierung.
Gerät zur Umgebungsüberwachung
Um die Umsetzbarkeit der Idee zu bestätigen, entwickelte Softeq ein Gerät zur Sammlung von Informationen über die Umgebung.
Das CPU-basierte Gerät sammelt Umgebungsdaten über angeschlossene Rückfahr- und Parkkameras. Die Lösung führt eine Vorverarbeitung der Bildsignale durch, die von Kamera-Lichtsensoren erfasst wurden. Für diesen Zweck haben wir spezielle Algorithmen entwickelt.
Ähnliches Projekt geplant?
Senden Sie Ihre Anforderungen und erhalten Sie eine profunde Einschätzung Anfrage senden